-
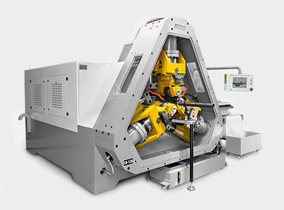
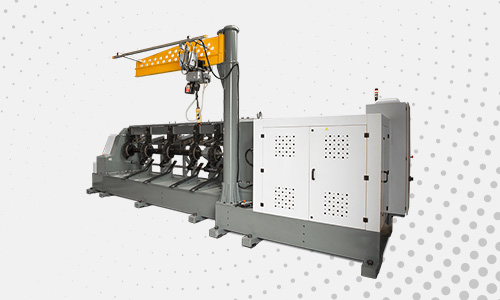
 Serie 2R
Serie 2R -
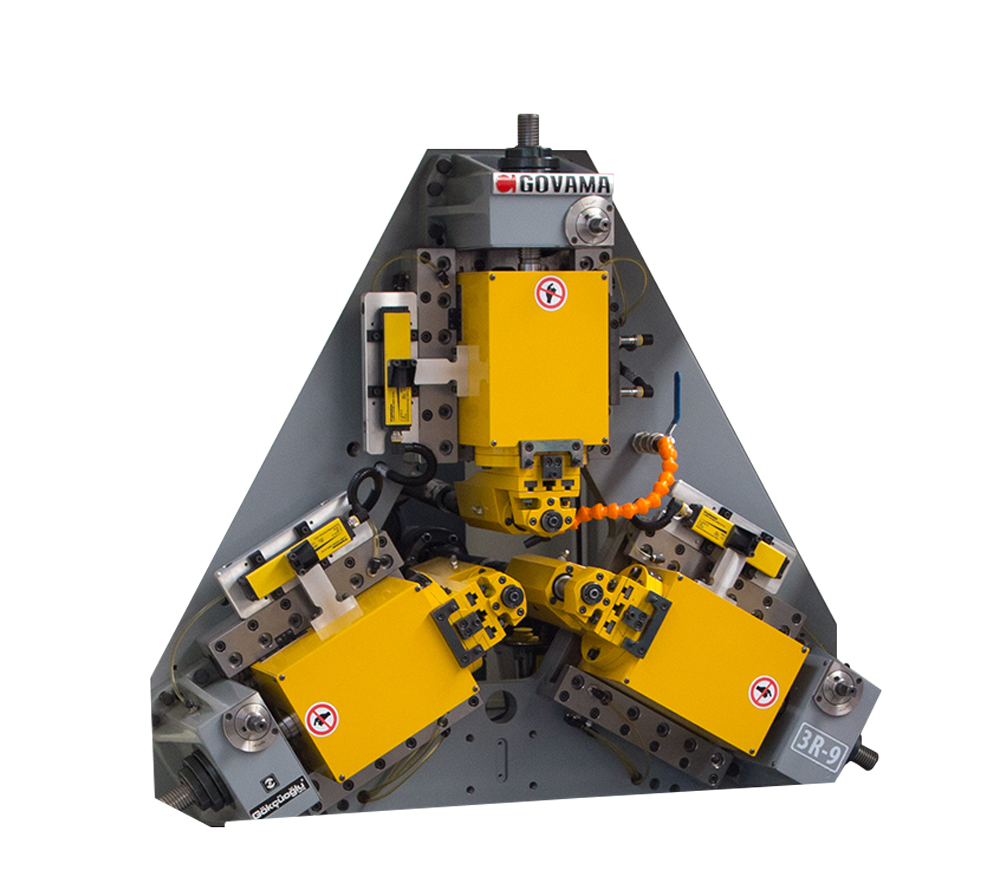
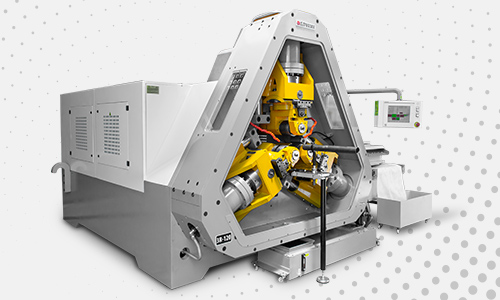
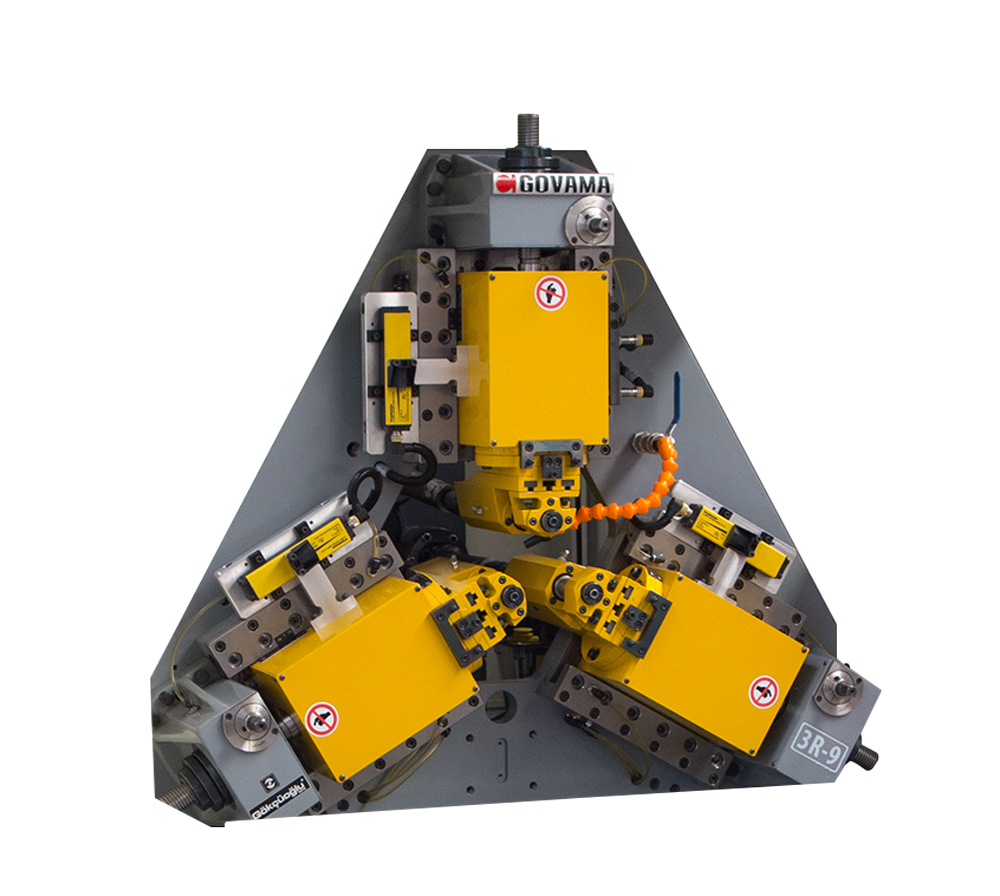
 Serie 3R
Serie 3R -
 Machines A Rouler Speciale
Machines A Rouler Speciale -
 Machine A Molette Et Secteur
Machine A Molette Et Secteur -
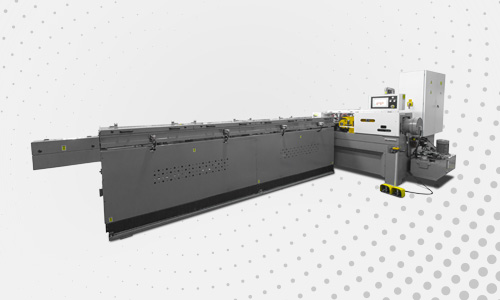
 Machines Spéciales
Machines Spéciales -
 Les Options
Les Options -
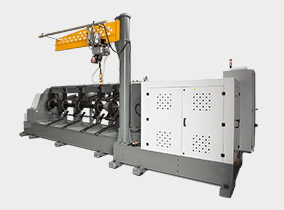
 Applications D'alimentation Automatique
Applications D'alimentation Automatique












{kind=link}
{kind=link}